Bitte ändert euer Passwort!
Im März 2026 wurde das Forum gehackt. Dabei hatten die Angreifer Zugriff auf die Datenbank und somit Zugriff auf eure Passwörter. Auch wenn das Forum kein Passwort im Klartext speichert, können die Angreifer eure Passwörter knacken. Bitte ändert daher dringend euer Passwort für das Forum. Solltet ihr das gleiche Passwort auch an anderer Stelle verwenden, ändert es bitte unbedingt an allen Stellen!
So geht es:
Anleitung Passwort ändern
Einstellungen Jeti DS16 + REX10A Empfänger und Graupner Alpha 300Q
- Chris_Trex550
- Autor
- Offline
- Neues Mitglied
-

- Beiträge: 2
- Thanks: 0
Einstellungen Jeti DS16 + REX10A Empfänger und Graupner Alpha 300Q
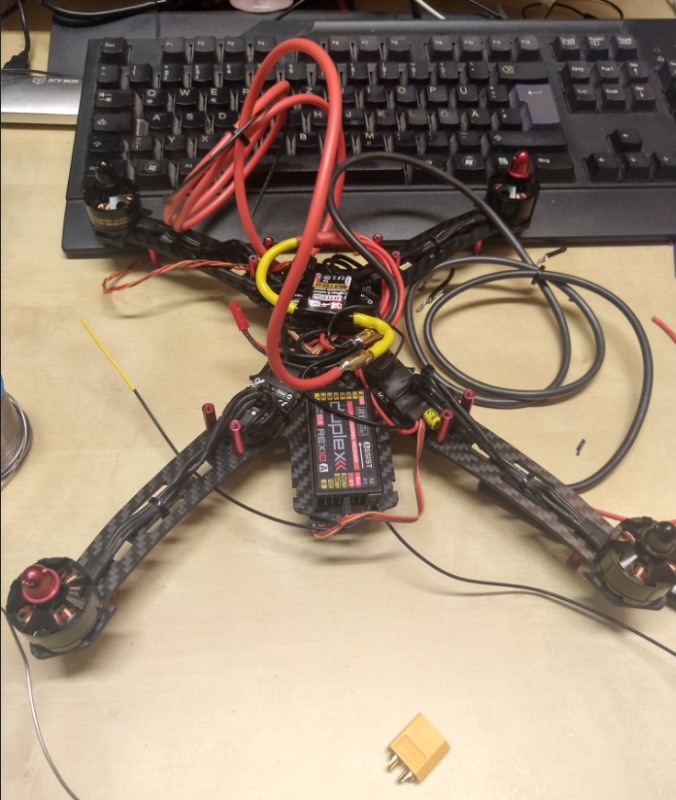
26 März 2020 00:09Gibt es hier Leute die mit dem REX10A als FC nutzen?
Und da es mein erster Copter ist bin ich mit der einstellung sehr unerfahren bzw. Ratlos wie ich weiter vorgehen muss.
Habe das X-Copter Profil in meiner DS16 angelegt und habe den REX10A auf Multicopter kofiguriert. und es funktioniert garnix.
Bin momentan ein bisschen ratlos wie ich weiter machen soll.
Wäre sehr dankbar wenn mir hier jemand weiterhelfen könnte.
Habe mal meine Aktulle Kofigurationsdatei angeängt.
Danke
mfg Christian
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- christian.tiefnig
- Offline
- Neues Mitglied
-
- Beiträge: 4
- Thanks: 0
Re: Einstellungen Jeti DS16 + REX10A Empfänger und Graupner Alpha 300Q
15 Sep. 2020 10:32ich habe ziemlich das gleiche Problem wie du... Ich habe eine Jeti DS24 und habe den REX 10A an einen Graupner Alpha 300Q Racecopter gebaut...
Was meinst du mit: Es funktioniert garnix?
Kannst du die Drehrichtungen der Motoren prüfen?
Kannst du die Drohne "Armen"? (Für den Flug aktivieren sodass die Motoren beginnen zu drehen)
Mein Problem sind die PID Werte...

Viele Grüße,
Christian


Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- HerrvonBalou
- Offline
- Neues Mitglied
-
- Beiträge: 13
- Thanks: 0
Re: Einstellungen Jeti DS16 + REX10A Empfänger und Graupner Alpha 300Q
01 Nov. 2020 10:27Es gibt aber im Netz keinen Bericht wo es wie funktioniert
Gruß
Bernd
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- christian.tiefnig
- Offline
- Neues Mitglied
-
- Beiträge: 4
- Thanks: 0
Re: Einstellungen Jeti DS16 + REX10A Empfänger und Graupner Alpha 300Q
02 Nov. 2020 16:15ich könnte dir bis zum Einstellen der PID-Werte helfen, da hab ich selber noch meine Probleme...
Im Stabilisierungsmodus sollte sich der Copter bei vollen Knüppelausschlägen auf eine einstellbare Neigung von z.B. 45° anstellen. Mein Copter macht das auch, allerdings nur bis zu einer gewissen Geschwindigkeit, dann zieht das Ding hoch und mach was es will bis der Großteil der Geschwindigkeit wieder abgebaut ist...
Mit den anderen Modi hab ich noch nix getestet weil immer eine gewisse Unsicherheit mitfliegt...
Grüße,
Christian
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- HerrvonBalou
- Offline
- Neues Mitglied
-
- Beiträge: 13
- Thanks: 0
Re: Einstellungen Jeti DS16 + REX10A Empfänger und Graupner Alpha 300Q
02 Nov. 2020 16:28Habt ihr schon Hilfe von JETI oder einem der Importeure erhalten?
Ich nehme halt momentan noch meinen kleinen Graupner Sender zum Kopter fliegen.
Sind die Probleme nur bei dem Graupner Kopter oder an was liegt der Fehler
Wie kommst du darauf, dass die PID Werte die Lösung sind?
Ich schicke dir meine email Adresse dann könntest du mir deine Einstellungen zuschicken, wäre toll
Gruß
Bernd
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- christian.tiefnig
- Offline
- Neues Mitglied
-
- Beiträge: 4
- Thanks: 0
Re: Einstellungen Jeti DS16 + REX10A Empfänger und Graupner Alpha 300Q
03 Nov. 2020 09:45mit dem Rex-Assist fliege ich nur den Graupner Copter. Ich habe noch ein RTF-Set einer Horizon Inductrix, die fliegt stabil und macht Spaß
")
Fliegst du auch mit einer FPV-Brille?
Normalerweise sollte der I-Wert leichte aerodynamisch verursachte Abweichungen vom Sollwert ausgleichen. Sobald ich mit ca. 30 km/h fliege muss ich korrigieren und ab 50 km/h bremst der Copter von selber ab... Nachdem der Rex Assist nicht weiß wie schnell man fliegt kann es eigentlich nur an den PID-Werten liegen...
Aktuell Verwendete PID-Werte (die haben so halbwegs gut funktioniert):
P I D
Quer: 17 3 1
Höhe: 12 2 1
Seite: 25 3 0
Viele Grüße,
Christian
Bitte Anmelden oder Registrieren um der Konversation beizutreten.