Stefan und Harald, erst mal herzlichen Dank!
Ich versuche meine Graupner Werte umzurechnen und auf Jeti zu übertragen. => Chaos.
")
Hallo Walter!!
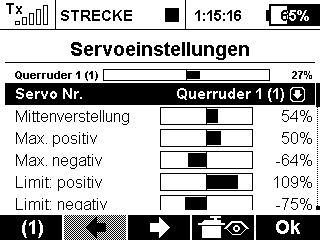
1.) Grundsätzlich ist bei Jeti die Trimmung mit 400 Schritten, also 0.5% Servoweg = 1% Trimmweg doppelt so genau ausgeführt! ...
Mfg Harald
Das hat mich als erstes verwirrt. Bei der Jeti Software ist doch alles streng logisch.
Da steht "Mittenverstellung" nicht Trimmung. Ich hätte da eine Anzeige des Servowegs mit einer Nachkomma für 0,5% Schritte erwartet und nicht das Doppelte. Hrrr...
Ist für mich als Einsteiger verwirrend. Zumal es in der Bedienungsanleitung nicht steht.
Hallo Walter!!
3.) Limit positiv und Limit Negativ sind der maximale physikalische Weg den das Servo machen darf, ohne mechanisch Kontakt mit anderen Bauteile zu haben.
Ich zieh die Limits mal vor weil ich das bisher immer als Zweites nach der Mitte einstelle.
Was die Limits im Prinzip sind ist mir klar. Also hier wird das in % Servoweg angezeigt? Absolut oder durch andere Einstellungen wie Mitte und Max + - verändert?
Sieht nicht aus wie die physikalischen Servo-Absolutwerte.
Kann man das irgendwo einstellen ob die Mitteneinstellung die Endwerte verschiebt? Hab den Eindruck, dass das zumindest für Gas geht.
Hast du ein 3D ist dies der maximale Weg im Modus 3D
Was ist ein 3D Modus? Ich stelle ein bei Servoeinstellungen.
Drehe den Drehregler, ist der gemeint?
...
2.) Max +Positiv und Max Negativ ist der maximale Ausschlag des Servos in Prozent Servoweg.
Werden diese Werte von der Mittelstellung und oder Limits beeinflusst? Werden die Limits auch irgendwie verschoben?
Gibt es dafür eine Formel? Jeti sagt doch immer es mag keine vorgefertigten Einstellungen.
P.S Du bist doch der Meister der Taranris aus dem RC-N , der in letzter Zeit auch noch eine MC-28 programmiert.
Meister kann ich nicht sagen. Auch da Einsteiger. Also OpenTx kommt mir von der Programmierung sehr entgegen. Beruflich hab ich mit Fernbedienung von Experimenten zu tun. Das geht viel über Schrittmotoren und deren Steuerung.
Von da bin ich klare Definitionen gewohnt.
Testweise hab ich seit kurzem eine Horus 10S mit OpenTx. Diese Software für mich persönlich logisch aufgebaut und ich hab wenig Probleme. Ist für andere vielleicht ungewohnt.
Der Sender ist klasse aber bei den Empfängern teste ich erstmal die Zuverlässigkeit mit Schaumwaffeln.
Die letzten Jahre hab ich Graupner verwendet, jetzt noch MC-28. Ein guter Sender aber für meine Modelle fehlen einige Dinge in der (alten) Software, z.B. Optimierung wie etwa Querruder-Differenzierung im Flug.
Der neue Sender wird mehr bieten und sieht toll aus aber ich warte erst mal eine Saison.
Jeti hat nach meiner Meinung die zuverlässigste Hardware. Die Software ist ja auch OK und stabil, aber schlecht dokumentiert und eben manchmal um drei Ecken gedacht.
Für mich gibt es einen Wunschsender: Jeti mit OpenTx.
Beste Grüße
Walter